Robotiese Poleermasjien – Hoë-Presisie Outomatiese Oppervlakafwerking





Gedetailleerde Diagram
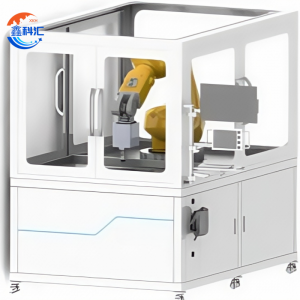

Oorsig van Robotiese Poleermasjien
Die Robotiese Poleermasjien is 'n gevorderde, volledig outomatiese oppervlakverwerkingstelsel wat ontwerp is om aan die hoogste vereistes in presisievervaardiging te voldoen. Dit kombineer ses-as robotiese beheer, kragterugvoer-poleertegnologie en dubbelkopkonfigurasie om 'n wye reeks materiale en komplekse geometrieë met uitsonderlike akkuraatheid en konsekwentheid te hanteer.
Of dit nou vir optiese lense, lugvaartonderdele, presisie-ingenieurskomponente of halfgeleiertoepassings is, hierdie masjien lewer stabiele, herhaalbare en hoëgehalte-oppervlakafwerkings – selfs by toleransies op nanometervlak.


Omvattende Werkstuk-Verenigbaarheid van Robotiese Poleermasjien
Die stelsel ondersteun die verwerking van:
-
Plat oppervlaktesvir glas-, keramiek- en metaalplate
-
Silindriese en koniese vormssoos rollers, skagte en buise
-
Sferiese en asferiese komponentevir optiese stelsels
-
Vryvormige en buite-as oppervlaktesmet komplekse kurwes en oorgange
Die veelsydigheid daarvan maak dit geskik virbeide massaproduksie en hoë-presisie persoonlike vervaardiging.
Kernkenmerke en voordele van robotiese poleermasjien
1. Dubbele poleerkoptegnologie
-
Toegerus metenkelrotasieenselfrotasiepoleerkoppe vir buigsaamheid.
-
Vinnige gereedskapwisselingsvermoë ondersteun verskeie verwerkingsmodusse sonder lang stilstandtyd.
-
Ideaal vir die wisseling tussen growwe en fyn poleerfases.
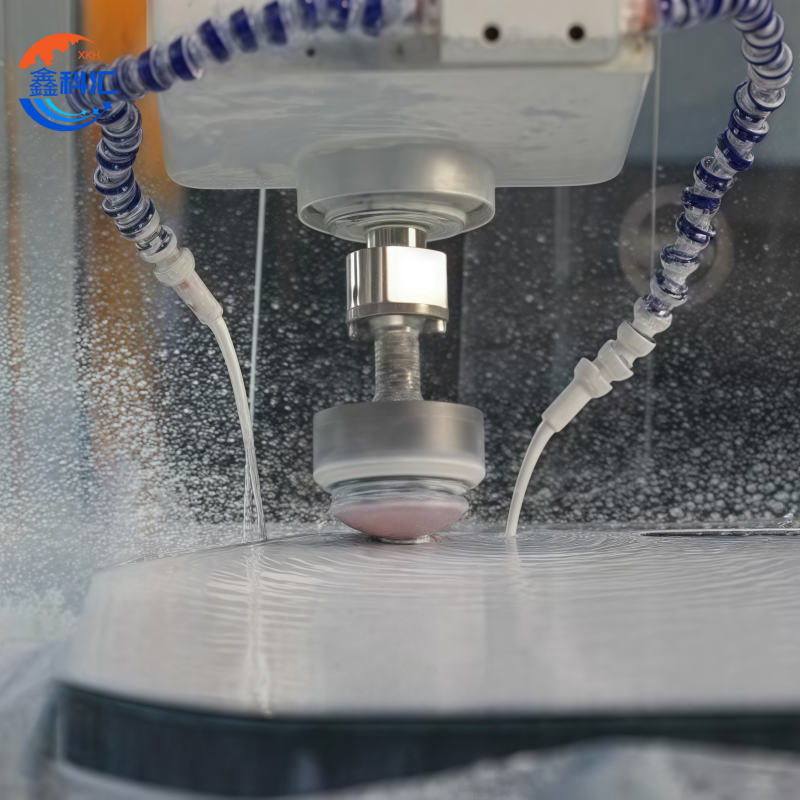
2. Presisie Kragbeheerstelsel
-
Intydse monitering vandruk, temperatuur en poleervloeistofvloei.
-
Konsekwente kragtoepassing verseker eenvormige oppervlakafwerking oor die werkstuk.
-
In staat om outomaties aan te pas by oppervlakongelykhede.
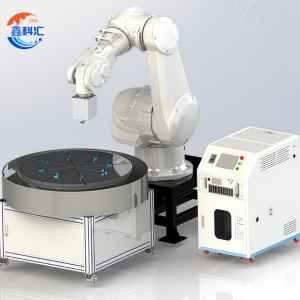
3. Ses-As Robotiese Beheer
-
Volle bewegingsvryheid om komplekse geometrieë te hanteer.
-
Gladde, akkurate bewegingspaaie bereken via gevorderde algoritmes.
-
Hoë herhalingsposisioneringsakkuraatheid van ±0.04 mm tot ±0.1 mm, afhangende van die model.
4. Slim outomatisering en meting
-
Outomatiese kalibrasie-instrumente vir presiese opstelling en belyning.
-
Koördinaatmetingstelsel vir akkurate posisionering.
-
Opsioneelaanlyn dikte moniteringvir intydse kwaliteitsbeheer.
5. Boukwaliteit van industriële gehalte
-
Dubbele servomotorontwerp verhoog poleerdoeltreffendheid en stabiliteit.
-
Stewige meganiese struktuur verminder vibrasie en verseker langtermyn duursaamheid.

Tegniese spesifikasies van robotiese poleermasjien
| Toerustingmodel | Robotliggaam | Herhaal Posisionering Akkuraatheid | Verwerkingsdiameterbereik | Enkelrotasie-poleerkop | Multi-rotasie poleerkop | Klein Gereedskap | Hoofwieltipe Polering | Sferiese Koppolering | Eindig Vinnige Verandering | Outomatiese Kalibrasie-instrument | Koördinaatmetingskop | Aanlyn Diktemonitering | Numeriese Beheerplatform |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| IRP500S | Stäubli TX2-90L | ±0.04mm / volle reeks | Φ50~Φ500mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP600S | Staubli TX2-140 | ±0.05mm / volle reeks | Φ50~Φ600mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP800S | Staubli TX2-160 | ±0.05mm / volle reeks | Φ80~Φ800mm | √ | √ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000S | Stäubli TX200/L | ±0.06mm / volle reeks | Φ100~Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000A | ABB IRB6700-200/2.6 | ±0.1mm / volle reeks | Φ100~Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP2000A | ABB IRB6700-150/3.2 | ±0.1mm / volle reeks | Φ200~Φ2000mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
| IRP2000AD | ABB IRB6700-150/3.2 | ±0.1mm / volle reeks | Φ200~Φ2000mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
Gereelde vrae – Robotpoleermasjien
1. Watter tipe werkstukke kan die robotpoleermasjien hanteer?
Ons robotpoleermasjien ondersteun verskeie vorms en oppervlaktes, insluitend plat, geboë, sferiese, vryvormige en komplekse kontoere. Dit is geskik vir optiese komponente, presisievorms, metaaloppervlaktes en ander hoë-presisie poleertoepassings.
2. Wat is die verskil tussen enkelrotasie- en multirotasie-poleerkoppe?
-
Enkelrotasie-poleerkopDie gereedskap roteer om 'n enkele as, ideaal vir standaard oppervlakafwerking en hoëspoed-materiaalverwydering.
-
Multi-rotasie poleerkopDie gereedskap kombineer rotasie met selfrotasie (wentelend), wat meer eenvormige polering op geboë en onreëlmatige oppervlaktes moontlik maak.
3. Wat is die maksimum verwerkingsdiameter?
Afhangende van die model:
-
Kompakte modelle (bv. IRP500S) hanteerΦ50–Φ500mm.
-
Grootskaalse modelle (bv. IRP2000AD) hanteer totΦ2000mm.
Oor Ons
XKH spesialiseer in hoëtegnologie-ontwikkeling, produksie en verkope van spesiale optiese glas en nuwe kristalmateriale. Ons produkte bedien optiese elektronika, verbruikerselektronika en die weermag. Ons bied saffier optiese komponente, selfoonlensdeksels, keramiek, LT, silikonkarbied SIC, kwarts en halfgeleierkristalwafers. Met bekwame kundigheid en moderne toerusting, blink ons uit in nie-standaard produkverwerking, met die doel om 'n toonaangewende hoëtegnologie-onderneming vir opto-elektroniese materiale te wees.

Verwante Produkte
-

4H-semi HPSI 2 duim SiC substraat wafer Produksie...
-
Pasgemaakte vierkantige boks vervoer boks vierkantige venster p ...
-

6 duim HPSI SiC substraatwafer Silikonkarbied ...
-

Saffier Korund vir Edelsteen Al2O3 kristal ru ...
-

Aluminium metaal enkelkristal substraat poleer ...
-

Au-bedekte wafer, saffierwafer, silikonwafer ...